About Me
I'm Yihua Qin, a third-year undergraduate student in Tsinghua University, where I'm currently pursuing a dual degree, a B.S. in Mathematics & Physics and a B.E. in Mechanical Engineering.
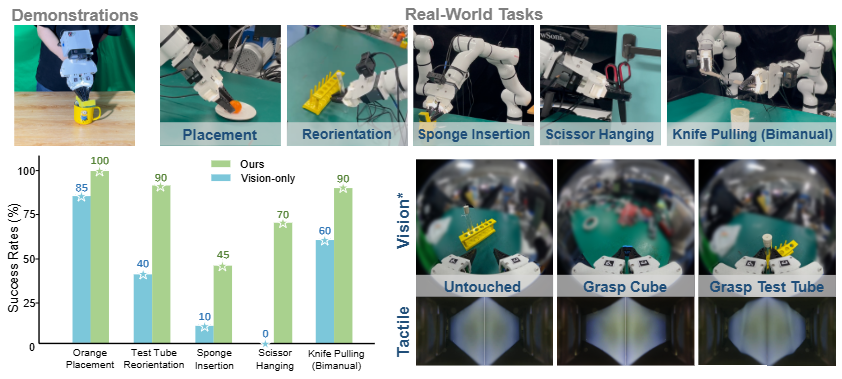
Now I am working at the RVSA Lab in Tsinghua University with Prof. Rui Chen. We are focusing on Visuo-tactile fusion imitation learning.
My research interests are Robotics, Robot learning (Imitate Learning), Computer Vision.
Education
-
 B.S. in Mathematics & Physics, B.E. in Mechanical Engineering Tsinghua University Sep 2022 - Jun 2026
B.S. in Mathematics & Physics, B.E. in Mechanical Engineering Tsinghua University Sep 2022 - Jun 2026
Research Experience
-
Research Assistant RVSA Lab Tsinghua University Jun 2024 - Present
Research Interests
- Robotic Manipulation
- Robot Learning
- Computer Vision